
 86-0519-86163211, 86-0519-86163212
86-0519-86163211, 86-0519-86163212
Deutsch
Aufrufe: 0 Autor: Site-Editor Veröffentlichungszeit: 01.07.2026 Herkunft: Website







Wenn humanoide Roboter zu laufen beginnen, müssen die Motoren, die ihre Gelenke antreiben, neu konstruiert werden – wie Wheatstones Axialflussmotoren zu den „Kernmuskeln“ der Robotik werden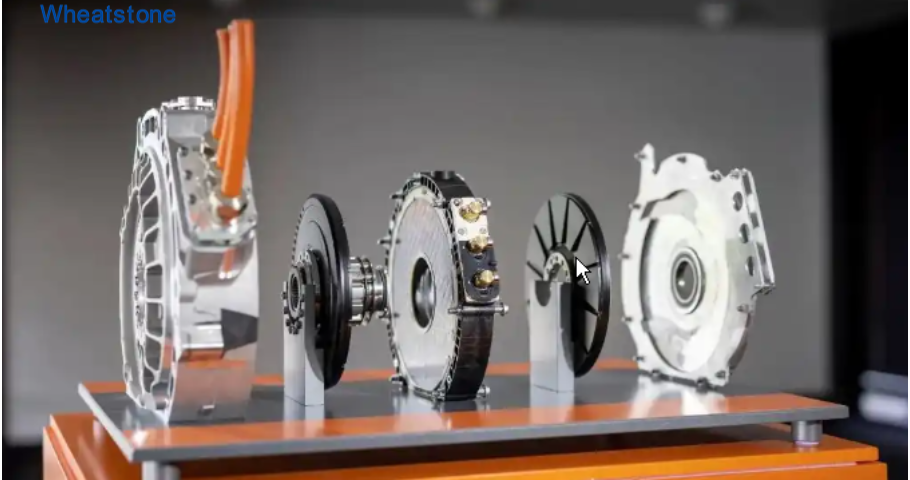
Im Jahr 2026 steht die Branche der humanoiden Robotik am Beginn eines explosionsartigen Wachstums. Tesla Optimus, Xiaomi CyberOne, Unitree H1 – Dutzende humanoider Roboter wechseln von Laboren zu Fabriken und Wohnungen. Jeder Schritt, Sprung und Griff dieser Roboter hängt von der koordinierten Bewegung Dutzender Präzisionsgelenke ab. Der Antriebskern jedes Gelenks ist ein Motor.
Herkömmliche Robotergelenke verwenden typischerweise Radialflussmotoren gepaart mit Getrieben. Der zylindrische Formfaktor von Radialflussmotoren weist jedoch inhärente Einschränkungen auf – große axiale Länge, hohes Trägheitsmoment und begrenzte Leistungsdichte. In Gelenken wie Knien und Hüften, die hochfrequente Bewegungen und hohe Belastungen erfordern, verstärken sich diese Mängel: Verzögerung der motorischen Reaktion, sperrige Gelenke und hoher Energieverbrauch.
Welchen Motor brauchen humanoide Robotergelenke?
Die Antwort: Axialflussmotoren.

Axialflussmotoren: Der natürliche Partner für Robotergelenke
Das flache Scheibendesign von Axialflussmotoren sorgt für eine extrem kurze axiale Länge, sodass der Motor bündig an der im Roboterglied eingebetteten Gelenkmontagefläche montiert werden kann. Diese Struktur erfüllt selbstverständlich die dreifachen Anforderungen an Robotergelenke: kurze axiale Länge, hohes Drehmoment und Leichtbau.
In Robotergelenkmodulen dient der Axialflussmotor als „Herz“ des Moduls – er liefert hohe Leistung in einem kompakten Formfaktor und mit einer Leistungsdichte, die bis zu doppelt so hoch ist wie bei herkömmlichen Motoren. In Robotergelenkmodulen reduziert das flache Scheibendesign das Trägheitsmoment und ermöglicht so eine präzise Unterstützung bei Hochfrequenzbewegungen und Hochlastvorgängen in Gelenken wie Knien und Hüften.
Axialfluss-Permanentmagnetmotoren sind Gegenstand laufender Forschung in Robotergelenkanwendungen. Studien zeigen, dass Dual-Rotor-Axialfluss-Permanentmagnetmotoren (DRAFPM) Vorteile bei der Reduzierung von Eisenverlusten und der Minimierung des Volumens durch den Wegfall des Statorjochs bieten. Axialflussmotoren zeichnen sich durch eine kurze axiale Länge, eine hohe Drehmomentdichte und eine kompakte Struktur aus und weisen ein erhebliches Anwendungspotenzial bei Hochlastrobotern auf.
Vom Labor zur Produktion: Inländischer Durchbruch bei Robotergelenken
Am Jilin University Chongqing Research Institute hat sein Portfoliounternehmen Xinghan Power Technology Co., Ltd. eine stabile Massenproduktion von Axialflussmotoren und Axialflussgelenkmodulen erreicht. Das Axialflussgelenkmodul integriert Motor-, Getriebe-, Encoder- und Antriebskomponenten in eine vollständige „Muskelgewebe“-Baugruppe, die für die Drehmomentvervielfachung, präzise Steuerung und intelligente Betätigung verantwortlich ist.
In einem kommerziellen Auftrag wurde ein kundenspezifisches Axialflussgelenkmodul zum Kernmuskel des humanoiden Roboters der nächsten Generation und ermöglichte die präzise Ausführung komplexer Bewegungen in mehreren Szenarien. Vom Labor zur Massenproduktion schaffte das Unternehmen diesen Übergang in nur einem Jahr und setzte damit einen neuen Maßstab für die Industrialisierungsgeschwindigkeit.
Im Bereich der humanoiden Robotik können Axialflussmotoren das Gewicht der Gelenkaktuatoren um 40–50 % reduzieren. Mit einer Leistungsdichte von 3–5 kW/kg und einer Drehmomentdichte von 15–25 N·m/kg bei einem Wirkungsgrad von 92–95 % unter Nennlast sind Axialfluss-Permanentmagnetmotoren zur bevorzugten Motortopologie für gewichtskritische Gelenkaktuatoren humanoider Roboter geworden.
Kundenspezifische Axialflussmotoren von Wheatstone: „Power-Muskeln“, entwickelt für Robotergelenke
Jiangsu Wheatstone verfügt über mehr als 20 Jahre Spezialerfahrung im Bereich Spezialmotoren und bietet maßgeschneiderte Axialflussmotorlösungen für Robotergelenkmodule.
Anpassung 1: Flacher Formfaktor – Unterputzmontage, platzsparend
Durch die flache Scheibenkonstruktion der Wheatstone-Axialflussmotoren wird die axiale Länge auf ein Drittel der Länge herkömmlicher Motoren komprimiert, wobei das Trägheitsmoment um 40–60 % reduziert wird. Der Motor kann direkt in das Robotergelenk eingebettet werden, ohne zusätzlichen Platz in den Gliedmaßen zu beanspruchen.
Anpassung 2: Hohe Drehmomentdichte – Roboter schneller laufen lassen und höher heben
Durch optimiertes elektromagnetisches Design und leistungsstarke Permanentmagnete liefern Wheatstone-Axialflussmotoren ein höheres Drehmoment bei gleichem Volumen. In Kombination mit Direktantriebs- oder Getriebelösungen mit niedrigem Übersetzungsverhältnis ermöglichen sie eine Kraftsteuerung mit hoher Bandbreite und eine geringe reflektierte Trägheit – wodurch Roboterbewegungen agiler und präziser werden.
Anpassung 3: Integrierter Encoder und Antrieb – Präzise Steuerung jedes Rotationsgrads
Wheatstone kann hochauflösende Encoder und maßgeschneiderte Antriebslösungen entsprechend den Designanforderungen des Gelenkmoduls integrieren und so eine präzise Regelung von Position, Geschwindigkeit und Drehmoment erreichen – so wird sichergestellt, dass jede Gelenkbewegung präzise und reaktionsschnell ist.
Anpassung 4: Wärmemanagementlösungen – Bewältigung der Wärmeerzeugung durch Hochfrequenzbewegung
Hochfrequente Gelenkbewegungen erzeugen erhebliche Wärme. Wheatstone bietet maßgeschneiderte Lösungen für Zwangsluftkühlung, Flüssigkeitskühlung oder natürliche Konvektion an, um einen kontrollierbaren Temperaturanstieg bei anhaltendem Hochlastbetrieb sicherzustellen.
Anwendbare Standards verweisen auf
| Standardumfang | den |
|---|---|
| IEC 60034-1:2022 | Rotierende elektrische Maschinen – Teil 1: Nennleistung und Leistung |
| IEC 60034-2-1 | Standardmethoden zur Bestimmung von Verlusten und Effizienz aus Tests |
| ISO 12100 | Sicherheit von Maschinen – Allgemeine Gestaltungsleitsätze – Risikobeurteilung und Risikominderung |
| ISO 10218 | Roboter und Robotergeräte – Sicherheitsanforderungen für Industrieroboter |
Wenn ein humanoider Roboter in einer Fabrikhalle Präzisionsmontagen durchführt; wenn ein Roboterhund flexibel über komplexes Gelände läuft; Wenn ein bionischer Arm präzise Hilfe bei der medizinischen Rehabilitation leistet – in jedem Robotergelenkmodul unterstützen kundenspezifische Axialflussmotoren von Wheatstone die Entwicklung von Robotern von „Gehfähigen“ zu „Fähigen, sich mit Agilität zu bewegen“, mit flachem Formfaktor und leistungsstarker Leistung.
Über Wheatstone
Mit mehr als 20 Jahren Spezialerfahrung im Bereich Spezialmotoren bietet Wheatstone ein umfassendes Portfolio, darunter Axialflussmotoren, druckfeste Servomotoren, Tiefseemotoren und Hochtemperaturmotoren. Das Unternehmen ist nach ISO 9001 und IATF 16949 zertifiziert und bietet maßgeschneiderte Axialflussmotorlösungen von 50 W bis 200 kW für Robotergelenke, geschickte Hände und leichte mechanische Arme.












