
 86-0519-86163211,86-0519-86163212
86-0519-86163211,86-0519-86163212
한국어
조회수: 0 작성자: 사이트 편집자 게시 시간: 2026-07-01 출처: 대지







휴머노이드 로봇이 달리기 시작하면 관절을 구동하는 모터를 재설계해야 합니다. 휘트스톤 축 자속 모터가 로봇 공학의 '핵심 근육'이 되는 방법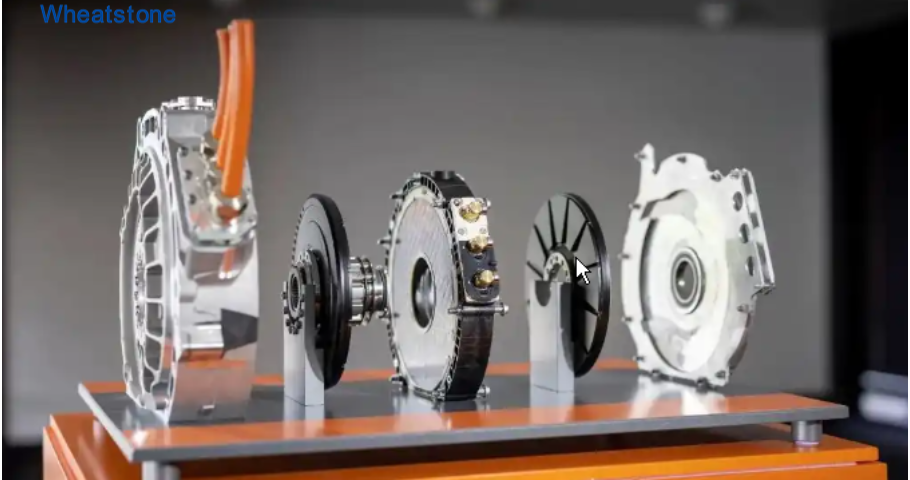
2026년, 휴머노이드 로봇 산업은 폭발적인 성장의 서막을 맞이하고 있습니다. Tesla Optimus, Xiaomi CyberOne, Unitree H1 – 수십 대의 휴머노이드 로봇이 실험실에서 공장 및 가정으로 전환되고 있습니다. 이 로봇이 수행하는 모든 걷기, 점프, 잡기는 수십 개의 정밀 관절의 조화로운 움직임에 달려 있습니다. 각 관절의 동력 코어는 모터입니다.
기존 로봇 조인트는 일반적으로 기어박스와 쌍을 이루는 방사형 플럭스 모터를 사용합니다. 그러나 방사상 자속 모터의 원통형 폼 팩터에는 긴 축 길이, 높은 관성 모멘트, 제한된 전력 밀도 등 고유한 제한 사항이 있습니다. 고주파 동작과 고부하 동작이 요구되는 무릎, 고관절 등의 관절에서는 운동 반응 지연, 관절의 부피 증가, 높은 에너지 소비 등의 단점이 증폭됩니다.
휴머노이드 로봇 관절에는 어떤 종류의 모터가 필요합니까?
답은 축방향 자속 모터입니다.

축방향 자속 모터: 로봇 관절의 자연스러운 파트너
축방향 플럭스 모터의 평면 디스크 설계는 매우 짧은 축 길이를 제공하므로 모터가 로봇 팔다리 내에 내장된 관절 장착 표면과 같은 높이로 장착될 수 있습니다. 이 구조는 짧은 축 길이, 높은 토크, 경량 구조라는 로봇 관절의 3가지 요구 사항을 자연스럽게 충족합니다.
로봇 관절 모듈에서 축방향 자속 모터는 모듈의 '심장' 역할을 하며 기존 모터의 최대 2배에 달하는 출력 밀도로 컴팩트한 폼 팩터로 높은 출력을 제공합니다. 로봇 관절 모듈은 평면 디스크 설계로 관성 모멘트를 줄여 무릎, 엉덩이 등 관절의 고주파 동작과 고부하 동작을 정밀하게 지원합니다.
축 자속 영구 자석 모터는 로봇 관절 응용 분야에서 지속적인 연구 주제였습니다. 연구에 따르면 DRAFPM(이중 회전자 축 자속 영구 자석) 모터는 고정자 요크를 제거하여 철 손실을 줄이고 부피를 최소화하는 데 이점을 제공하는 것으로 나타났습니다. 축 자속 모터는 짧은 축 길이, 높은 토크 밀도 및 컴팩트한 구조를 특징으로 하며 고부하 로봇에 상당한 응용 가능성을 보여줍니다.
실험실에서 생산까지: 로봇 관절의 국내 혁신
길림대학교 충칭연구소의 포트폴리오 회사인 Xinghan Power Technology Co., Ltd.는 축방향 자속 모터 및 축방향 자속 조인트 모듈의 안정적인 대량 생산을 달성했습니다. 축방향 플럭스 조인트 모듈은 모터, 기어박스, 인코더 및 드라이브 구성 요소를 토크 증폭, 정밀 제어 및 지능형 작동을 담당하는 완전한 '근육 조직' 어셈블리에 통합합니다.
한 상업적 주문에서 맞춤형 축 플럭스 조인트 모듈은 차세대 휴머노이드 로봇의 핵심 '근육'이 되어 여러 시나리오에서 복잡한 동작을 정확하게 실행할 수 있게 되었습니다. 실험실에서 대량 생산에 이르기까지 회사는 단 1년 만에 이러한 전환을 달성하여 산업화 속도에 대한 새로운 기준을 세웠습니다.
휴머노이드 로봇 분야에서 축방향 플럭스 모터는 관절 액추에이터 무게를 40~50% 줄일 수 있습니다. 정격 부하에서 92~95% 효율로 3~5kW/kg의 출력 밀도와 15~25N·m/kg의 토크 밀도를 갖춘 축 자속 영구 자석 모터는 중량이 중요한 휴머노이드 로봇 관절 액추에이터에 선호되는 모터 토폴로지가 되었습니다.
Wheatstone 맞춤형 축 자속 모터: 로봇 관절용으로 설계된 '파워 머슬'
특수 목적 모터 분야에서 20년 이상의 전문 경험을 보유한 Jiangsu Wheatstone은 로봇 관절 모듈을 위한 맞춤형 축 자속 모터 솔루션을 제공합니다.
맞춤화 1: 플랫 폼 팩터 - 매립형, 공간 효율적
Wheatstone 축방향 자속 모터의 평면 디스크 설계는 축 길이를 기존 모터의 1/3로 압축하고 관성 모멘트를 40-60% 줄입니다. 추가 사지 공간을 차지하지 않고 모터를 로봇 관절 내에 직접 내장할 수 있습니다.
맞춤화 2: 높은 토크 밀도 – 로봇을 더 빠르게 작동하고 더 높이 들어 올리기
최적화된 전자기 설계와 고성능 영구 자석을 통해 Wheatstone 축 자속 모터는 동일한 볼륨 내에서 더 높은 토크 출력을 제공합니다. 직접 구동 또는 저비율 전송 솔루션과 결합하면 고대역폭 힘 제어와 낮은 반사 관성이 가능해 로봇 동작이 더욱 민첩하고 정확해집니다.
맞춤 설정 3: 통합 인코더 및 드라이브 – 모든 회전 각도를 정밀하게 제어
Wheatstone은 관절 모듈 설계 요구 사항에 따라 고해상도 인코더와 맞춤형 드라이브 솔루션을 통합하여 위치, 속도 및 토크의 정밀한 폐쇄 루프 제어를 달성하여 모든 관절 동작의 정확성과 반응성을 보장합니다.
맞춤화 4: 열 관리 솔루션 – 고주파 모션으로 인한 열 발생 문제 해결
고주파 관절 동작은 상당한 열을 발생시킵니다. Wheatstone은 지속적인 고부하 작동 시 제어 가능한 온도 상승을 보장하기 위해 맞춤형 강제 공랭, 액체 냉각 또는 자연 대류 솔루션을 제공합니다.
적용 가능한 표준 참조
| 표준 | 범위 |
|---|---|
| IEC 60034-1:2022 | 회전 전기 기계 - 1부: 정격 및 성능 |
| IEC 60034-2-1 | 테스트에서 손실과 효율성을 결정하는 표준 방법 |
| ISO 12100 | 기계의 안전 – 설계의 일반 원칙 – 위험 평가 및 위험 감소 |
| ISO 10218 | 로봇 및 로봇 장치 – 산업용 로봇에 대한 안전 요구 사항 |
휴머노이드 로봇이 공장 현장에서 정밀 조립을 수행하는 경우 로봇 개가 복잡한 지형을 유연하게 달릴 때; 생체공학 팔이 의료 재활에 정밀한 지원을 제공할 때, 모든 로봇 관절 모듈 내에서 Wheatstone 맞춤형 축 자속 모터는 플랫 폼 팩터와 강력한 출력을 통해 '걸을 수 있는' 로봇에서 '민첩하게 움직일 수 있는' 로봇으로의 진화를 지원합니다.
휘트스톤 소개
특수 목적 모터 분야에서 20년 이상의 전문 경험을 보유한 Wheatstone은 축방향 자속 모터, 방폭 서보 모터, 심해 모터 및 고온 모터를 포함한 포괄적인 포트폴리오를 제공합니다. 이 회사는 ISO 9001 및 IATF 16949 인증을 받았으며 로봇 관절, 능숙한 손 및 가벼운 기계 팔을 위한 50W~200kW의 맞춤형 축 자속 모터 솔루션을 제공합니다.












